TOF Calibration
One place to start learning about TOF calibration is with the location of the source code on github where one finds a README file explicitly listed at the bottom of the code listing.
A more details description of the calibration procedures and basic ideas behind the approach can be found in a GlueX document tofcalib.pdf. It is not up to date regarding the functional form that is used for the walk correction fit but the basic ideas remain the same.
Calibration
The TOF calibration is manly focused on timing, the most important observable the TOF detector is providing. The main correction to the measured time from any given PMT is the walk correction caused by the fact that leading edge discriminators are used to generate the logical signal from the analog PMT signal. Up to now this walk correction has been determined by the shape of the two dimensional distribution of time vs. ADC integral where the time has been referenced to the time as reported by the flash ADC integral. This has the disadvantage that for high rate paddles close to the photon beam line the integral can be distorted due to pile up. A better approach is to use the ADC peak amplitude instead. However such a distribution requires a different functional form as a model. In addition it is also no longer possible to model the full ADC range with one functional form for all paddles at all locations and still have a stable procedure. Instead the ADC region is divided in two with the location of the separation being the dip before the rise of the minimum landau distribution in the ADC response function.
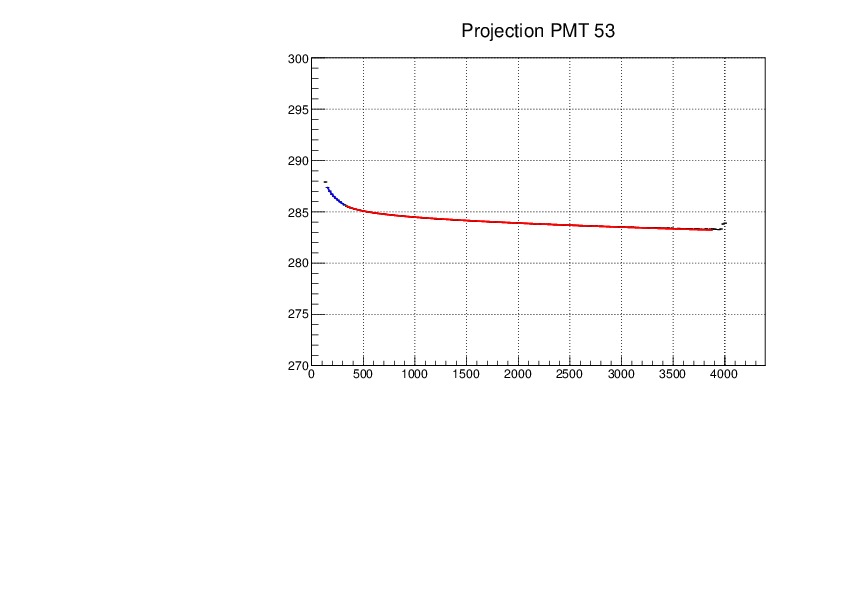
- The functional form has four parameters and is as follows:
a + b*pow(ADC,-0.5) + c*pow(ADC,-0.33) + d*pow(ADC,-0.2)
The two distinct fit regions are indicated by the two colors blue and red, the jump at ADC 4090 is due to overflow and binning effects.
The vertical axis is Ttdc-Tadc, the horizontal axis is ADC amplitude.
- Using this approach for the walk correction and leaving the rest of the calibration procedure
the same leads to much more stable results for the timing offsets over the whole running period.
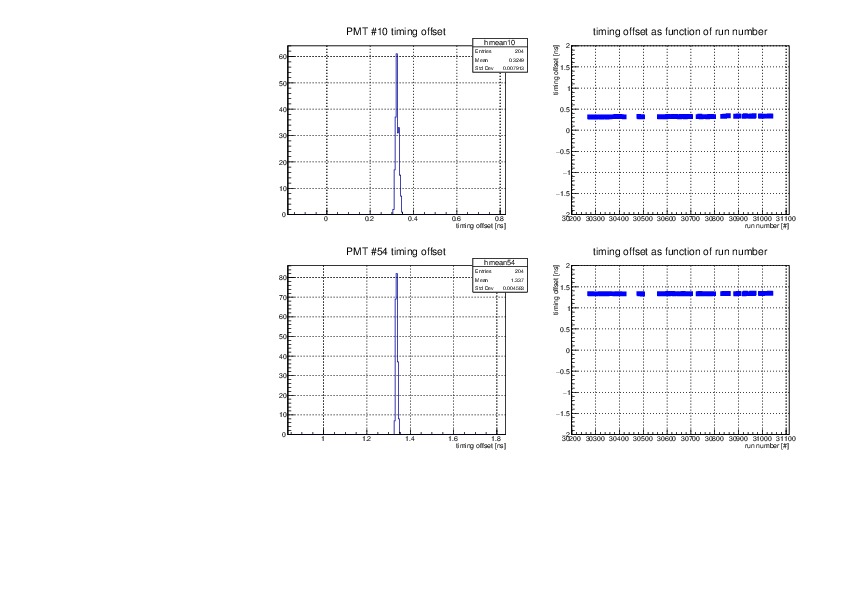
Here we show paddle 9 with both PMTs on either end.
Note the variation of the offsets is very small (<10ps) for these two PMTs
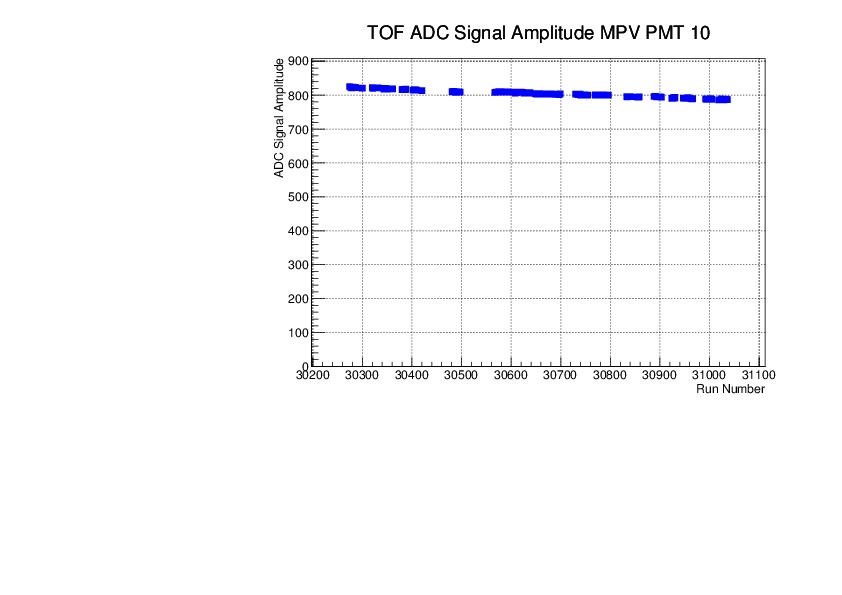
- The stability of the PMT response over the run period is shown here for PMT10.
In this particular instance the gain reduction is about 5%.